Balloon-Integrated Pneumatic Tactile Sensor for Tissue Palpation in Minimally Invasive Surgery
Abstract
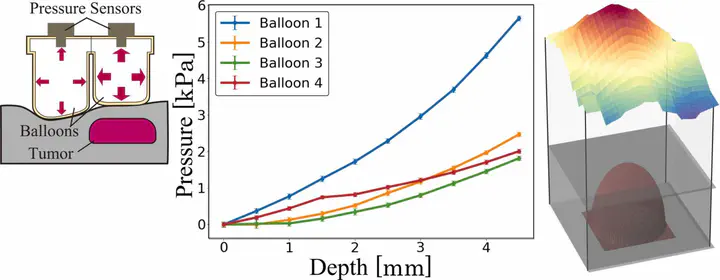
Minimally invasive surgeries (MIS) have increased because of their advantages, such as small incisions, less pain, and short recovery. However, a significant drawback of MIS is the absence of tactile sensation due to the small aperture, which is crucial for tumor palpation during surgeries to determine the resection area. This paper presents a novel tactile sensor specifically designed for tumor localization in MIS. In an ideal scenario, a tactile sensor designed for tumor localization should satisfy the following criteria: (1) flexibility to avoid tissue damage, (2) capability to measure hardness distribution, (3) a small diameter for access through small incisions, and (4) ease of fabrication to enable sensor sterilization. The proposed scope head consists of four balloons connected to a pressure sensor with a 20-mm scope diameter. By measuring the reactive forces resulting from the applied indentation force, the deformable balloons enable the conversion of these forces to internal pressure changes. Leveraging the fact that tumors exhibit greater stiffness than healthy tissue, tumor localization can be achieved by analyzing the information obtained from the internal pressure changes in the four balloons. The balloon materials and shapes were optimized, and detectability was evaluated. The results confirm that tumor models with a diameter above 5 mm are detectable. Furthermore, successful tumor localization was achieved with a phantom test, as evidenced by the generated heat map.
Naoki TANO
Master’s student of Mechanical Engineering
My research interests include translational research, tactile sensing and shear wave elastography.